

【ケースハンドリングロボット&フラップ型ソーティングロボット】
本システムにより、仕分~出荷エリアへの搬送までを完全無人化することが可能です。
・ソーティングロボットの架台を1100mm×1100mmパレットを使用することにより、ソーティングロボット対面通行幅1100mm、ケースハンドリングロボット通路幅(前後進)1100mm、ケース設置奥行(2個)1100mmにモジュール化することもできます。
・ケースの回収・補充は1個づつ異なる列でも可能です。
<最下段までスクロールして動画をご覧下さい>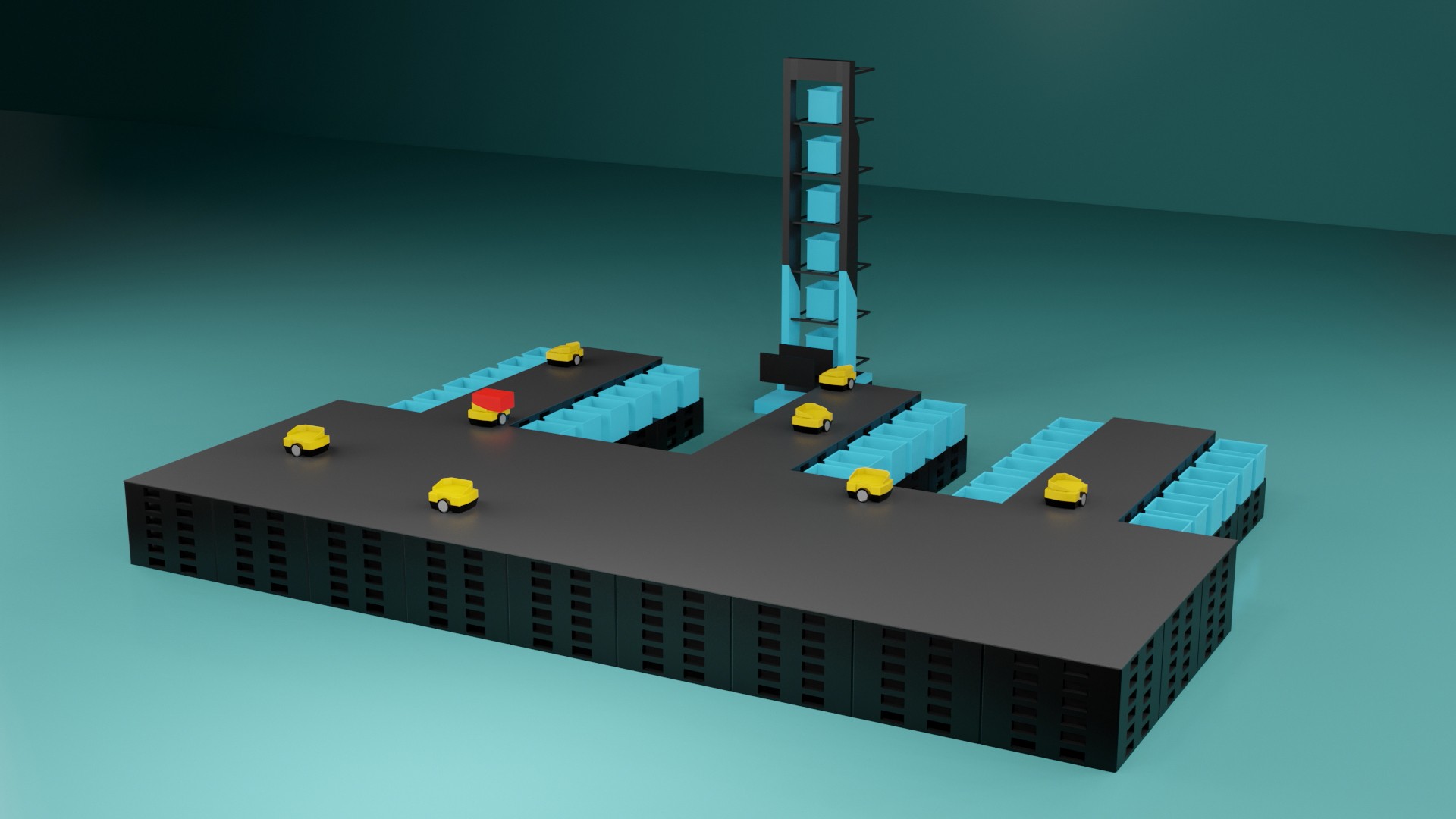
【インテリジェントなスケジューリングシステム】
・スマートな交通制御、複数シナリオ、複数車両のスケジューリング機能
・安定した効率的なナビゲーションモード、マルチパスのリアルタイム設計、車両操作の包括的な監視
【6つのメリット】
・モジュール設計
・レーダー障害物回避機能
・安全なエッジ構造
・オンデマンド展開
・短い実装サイクル
・低コスト
【製品規格】
| 型式 | Z-50S |
| ロボット寸法(長さx幅x高さ) | L1560 mm x W860 mm x H3800 mm / H4400 mm(MAX) |
| ロボット重量 | 450 kg |
| 積載数量 | 6 ケース / 8 ケース(MAX) |
| 最大積載荷重 | 30 kg / ケース、180 kg / 台 |
| ケース寸法(長さx幅x高さ) | L500~600 mm x W400 mm x H100~380 mm |
| 最大走行速度 | 1.2 m / 秒 |
| 最大昇降速度 | 0.5 m / 秒 |
| シングルピックアップ時間 | 4.5 秒 |
| シングルデリバリー時間 | 4.0 秒 |
| ワークステーションのピッキング効率 | 350~400 ユニット / 時間 |
| 取り扱い効率 | 35~45 ケース / 時間 |
| 旋回能力 | 回転直径 2 m、旋回角度精度 ±0.3 ° |
| 走行位置精度 | ±30 mm |
| 停止位置精度 | ±10 mm |
| 通路幅 | 1100 mm |
| ケースクリアランス | 110 mm |
| ドライブモード | 二輪差動駆動 |
| ナビゲーション | 2次元コード / 慣性 |
| 障害物回避 | レーダー |
| コミュニケーションモード | WiFi |
| 充電 | 自動 / 手動充電 |
| 保護 | 赤外線、超音波コントロール |
| 連続回帰関数 | サポート |
| 電圧 | DC 48 V |
| バッテリー容量 | 46 Ah |
| フル充電時間 | ≦1.5 時間 |
| バッテリー稼働時間 | ≧6 時間 |
| AGV充電比率 | 1 : 7 |
| フル充電および放電回数 | 2000 回 |
【製品紹介動画】





